
動物から着想を得て、ロボットの動きを改良し、より動物の効率的な動きや機能を再現すると言う研究はこれまでにも多く行われていたが、今回米国の科学者により発表された方法は、そんな従来の研究の常識を遙かに超えた物だろう。彼らは、実際に死んだクモを操って、小さなものを繊細につかむ方法を考案したのだ。
生分解性のロボットとして生物を直接利用する
クモは、哺乳類が相反する筋肉を伸縮させて手足を動かすのとは異なり、血圧を使って足を動かしている。具体的には、クモの頭の近くにある「肛門室」が収縮すると脚に血液が送られ、脚が伸びる。そして、その圧力が抜けると、脚は再び閉じられる。イメージとしては、吹き戻し(ピロピロ笛)みたいな物だろうか。

クモが死ぬと、彼らの心臓は鼓動を停止し、その油圧を失う。これが、彼らが死ぬと丸まってボールのようになる理由だ。しかしその丸まって死んでしまったクモの死骸と空気で満たされた注射器とを組み合わせると、便利な既製のロボットグリッパーになるという。

テキサス州ライス大学のDaniel Preston助教授とFaye Yap大学院生が率いるチームは、死んだオオヒメグモに手動でこのような動きを起こさせることができるかどうかを調べることにした。科学者たちはこの研究分野を、死体を表す「Necro-」とロボット工学の「Robotics」を合わせて、 「Necrobotics: ネクロボティクス」と名付けた。
Preston助教授はプレスリリースの中で、「この分野のソフトロボティクスは、これまで利用されていなかったタイプの動作や材料を利用できるため、非常に楽しいものです。クモは、この分野の研究研究対象としてこれまで使われたことのないものですが、多くの可能性を秘めています」と述べている。
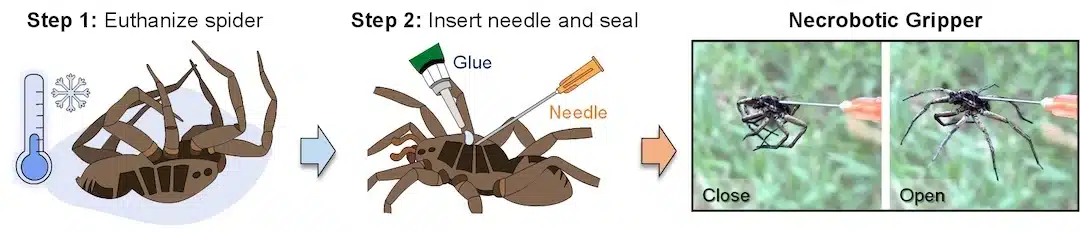
方法としては、まずクモを安楽死させる。その後、肛門室に針を刺す。針を刺したところに接着剤を一滴垂らして、針が動かないように固定する。
その針に取り付けた注射器で少量の空気を送り込み、脚を開かせる。そして、空気を抜くと脚が閉じる。これまでの実験で、このクモ型ネクロボディグリッパーは、クモ自身の体重の130%以上を持ち上げることができたという。
研究者によると、オオヒメグモの関節は非常に丈夫で、組織が劣化し始めるまで約1,000回の開閉サイクルが可能だったとのことだ。更に生分解性のポリマーコーティングを施すことで、寿命が延びることが期待される。
このネクロボディ・グリッパーは、不気味な科学研究の対象であるだけでなく、実用的な用途にも使えるかもしれない。
「このような小さなスケールで物体を分類したり移動させたりするような反復作業や、マイクロエレクトロニクスの組み立てのようなものまで、検討できるかもしれません。また、クモは生分解性を持っています。ですから、従来の部品で問題となるような大きな廃棄物の流れが発生することはありません。」とPreston助教授は述べている。
論文
- Advanced Science: Necrobotics: Biotic Materials as Ready-to-Use Actuators
参考文献
- Rice University: Rice engineers get a grip with ‘necrobotic’ spiders
- via New Atlas: “Necrobotics” tech uses spider carcasses as robotic grippers
研究の要旨
進化によって完成されたデザインは、チーターの運動能力やクラゲのコンプライアンスを模倣した、生物にインスパイアされた動物のようなロボットに反映されている。バイオハイブリッド・ロボットは、さらに一歩進んで、生きた素材を工学的システムに直接組み込む。バイオインスパイアとバイオハイブリッド化は、新しいエキサイティングな研究につながっているが、人類は、初期の祖先が動物の皮を衣服として着用し、骨を道具として使用して以来、生物由来の材料(生物に由来する非生物材料)に依存してきた。この研究では、無生物のクモを、たった1回の簡単な製作工程ですぐに使えるアクチュエーターとして再利用し、生物由来の素材をロボット部品として使用する「ネクロボティクス」の分野を開拓した。クモのユニークな歩行メカニズムは、脚を伸ばすために拮抗する筋肉ペアではなく、水圧に依存している。このネクロボティック・グリッパーは、不規則な形状を持ち、自身の質量の130%までの物体を把持することができる。さらに、このグリッパーはハンドヘルド・デバイスとして機能し、屋外環境では自然にカモフラージュすることができる。ネクロボティクスは、運動と関節のための同様の油圧機構を持つ他の生物に由来する生物材料を組み込むために、さらに拡張することができる。





コメントを残す