人間の気管細胞を用いて、自律的に動き、神経の成長を促進す微小生物ロボット、通称「バイオボット」を作成するという革新的な研究が、タフツ大学とハーバード大学のビース研究所によって行われた。この研究は、再生医療や疾患治療において大きな変革をもたらす可能性を秘めている。
バイオボットは、人体内で様々な任務を遂行するために開発されている。例えば、薬物の配達やがん細胞の識別などが挙げられる。今回の研究では、タフツ大学とバーモント大学が以前に行った、カエルの胚細胞を用いて作成された多細胞バイオボット「Xenobots(ゼノボット)」の研究を基に、人間の気管細胞を使用して独自のバイオボットを作成した。
ゼノボットは、ナビゲーション、情報記録、自己修復などの能力を持っていたが、これらの能力がカエルの細胞から来るものなのか、他の種の細胞から作成されたバイオボットでも可能なのかは不明であった。今回の研究では、細胞を自然な環境から取り出し、異なる「体の計画」に再組み合わせて、他の機能を果たすことができるかどうかを探求した。研究者たちは、遺伝子改変を行わずに、成人の人間の細胞を使用して、強化された能力を持つバイオボットを作成することに成功した。
研究の主導者であるGizem Gumuskaya氏は、「細胞が体内でデフォルトの特徴を作り出す以外に何ができるかを探ることを目指しました」と述べている。彼らは、人間の気道の表面から取り出した気管細胞を始点とし、気管支上皮前駆細胞が繊毛を持つ多細胞の球体を形成する既存の能力を活用する新しいプロトコルを開発した。このプロセスを変更することで、繊毛が外側にある球体を生成した。
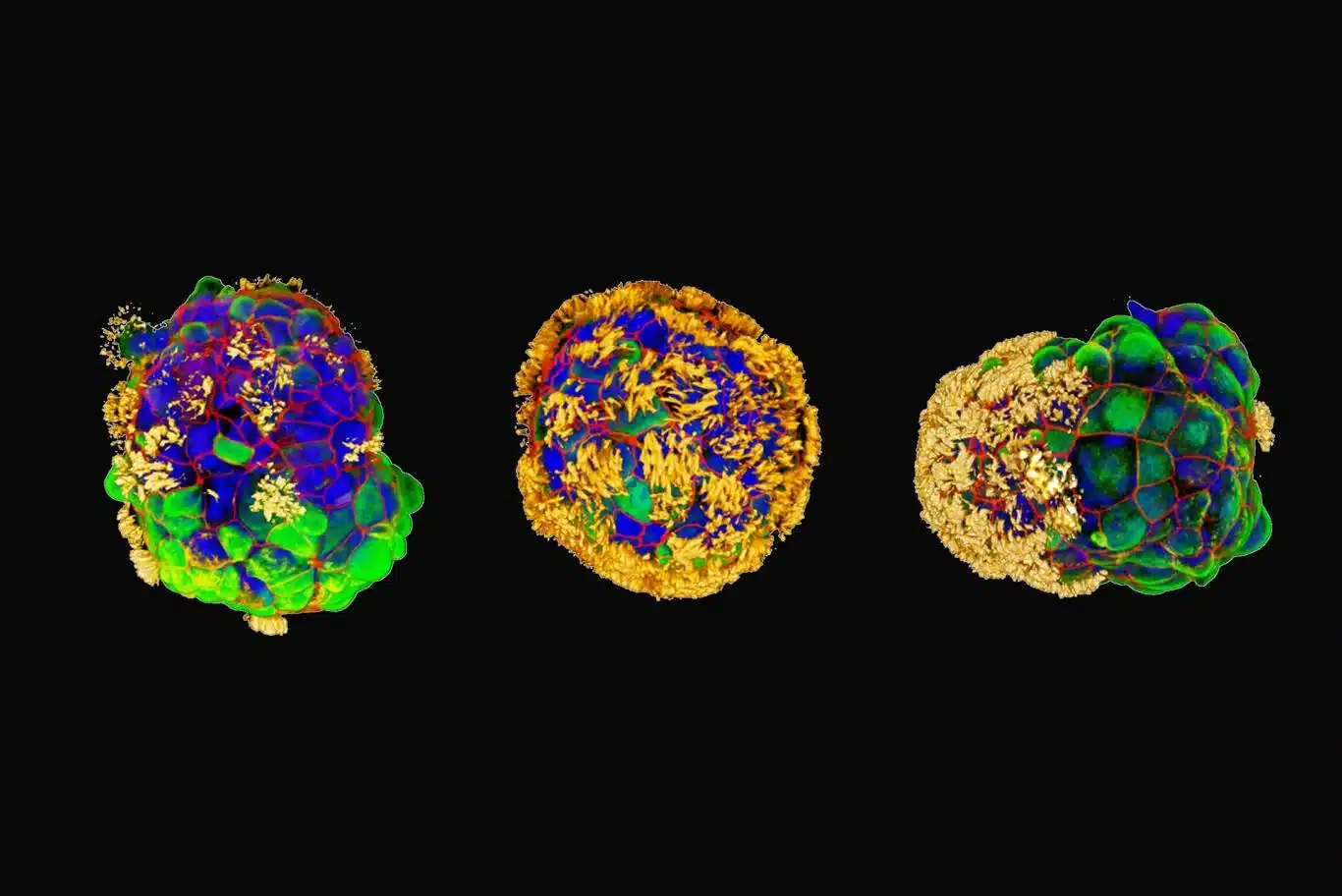
数日後、研究者たちが「Anthrobots(アンスロボット)」と名付けたこれらの新しい細胞は、繊毛によって駆動されて動き始めた。成長したAnthrobotsは、30から500ミクロンの大きさで、一部は球形で繊毛で完全に覆われているもの、不規則な形やフットボール形状で繊毛が不均一に覆われているものがあった。繊毛の分布によって、Anthrobotsの動き方が決まり、ループしたり、まっすぐまたは曲がった道を這うように動いた。Anthrobotsは通常、実験室の条件下で45から60日間生存し、その後自然に生物分解された。
Gumuskaya氏は、「Anthrobotsは実験皿の中で自己組織化する」と説明している。「ゼノボットとは異なり、形を与えるためにピンセットやメスを必要とせず、胚細胞ではなく成人の細胞を使用できる。これは完全にスケーラブルであり、これらのボットを並行して大量に生産することができる。これは治療ツールを開発するための良いスタートです」。
研究者たちは、実験室の皿で2D層の人間のニューロンを成長させ、細い金属棒で細胞を傷つけて「傷」を作り、細胞がない領域を作成した。彼らはAnthrobotsの群れを皿に置き、ニューロンの表面を移動する様子を観察した。ボットは新しい成長を促進し、傷の部分を埋め、健康な細胞と同じ厚さのニューロンの橋を作った。Anthrobotsがいない傷の部分ではニューロンは成長しなかった。
もう一人の著者であるMichael Levin氏は、「実験室で構築する細胞の集合体は、体内で行うことを超えた能力を持つことができます。遺伝子のDNAを変更せずに、通常の患者の気管細胞が自分自身で動き、損傷領域を越えてニューロンの成長を促進できるというのは、魅力的で完全に予期せぬことです。今、私たちは治癒メカニズムがどのように機能するか、そしてこれらの構造が他に何ができるかを調査しています」と述べている。
人間の細胞を使用する利点には、患者自身の細胞からボットを構築し、免疫応答を引き起こすことなく、また免疫抑制薬を必要とせずに治療作業を行うことができることが含まれる。
これらのボットのさらなる開発は、動脈のプラークの蓄積をクリアする、損傷した脊髄や網膜神経を修復する、細菌やがん細胞を認識する、または特定の組織に薬物を届けるなど、他の応用につながる可能性がある。理論的には、Anthrobotsは組織を治癒しながら再生促進薬を届けるのに役立つかもしれない。
論文
- Advanced Science: Motile Living Biobots Self-Construct from Adult Human Somatic Progenitor Seed Cells
参考文献
- Tufts University: Scientists Build Tiny Biological Robots from Human Cells
- Wyss Institute: Scientists build tiny biological robots from human cells
研究の要旨
成体の体細胞からの細胞の可塑性や、遺伝的に野生型の細胞から誘導された生きた構築物における体形や行動の潜在的な多様性については、基本的な知識のギャップが存在する。ここでは、直径が30ミクロンから500ミクロンで、繊毛を動力源とする運動能力を持つ、スフェロイド型の多細胞生物ロボット(バイオボット)プラットフォームであるアントロボットを紹介する。各アンソロボットは、成人のヒト肺に由来する単一細胞から始まり、細胞外マトリックス中で2週間培養され、粘性の少ない生息環境に移された後、多細胞運動性バイオボットに自己構築する。アントロボットは、運動パターンがタイトなループから直線まで、速度が5-50ミクロンs-1までと多様な行動を示す。解剖学的調査から、この行動の多様性は形態の多様性と有意な相関関係があることが明らかになった。アンソロボットは、完全な極性体や全体が繊毛で覆われた体、球形や楕円形の形態をとることがあり、それぞれが明確な運動タイプと関連している。アントロボットは、in vitroの培養ヒト神経細胞シートを横断し、傷の迅速な修復を誘導できることがわかった。微小環境の手がかりを一括して制御することで、遺伝子編集や手作業による彫刻を直接行わなくても、新しい予期せぬ行動や生物医学的に関連した能力を持つ、新しい構造を形態形成過程で発見することができる。







コメントを残す