
我々は、物心ついた頃には、信号機で「赤は止まれ」、「緑は進んで良い」合図である事を教えられてきた。運転をする頃には、黄色の信号は「注意して進め」と、教習所で教わったが、それが今後は変わるかもしれない。
ノースカロライナ州立大学の研究者たちは、自律走行車(AV)が今後の交差点の交通の流れをインテリジェントに管理していることをドライバーに知らせるために、“第4の信号灯火”である、”白い信号灯火”を追加することを提案している。研究者らは、これによって交通渋滞のレベルも全体的な燃料消費量も減らせるとしている。
この白い信号灯火は、「前を走る車についていくように指示する」物であるとの事だ。研究者らが「ホワイトフェーズ」と呼ぶこの白い灯火は、自律走行車(AV)自体のコンピューティングパワーを利用していると、論文の責任著者でNC Stateの土木・建設・環境工学准教授のAli Hajbabaie氏は説明する。
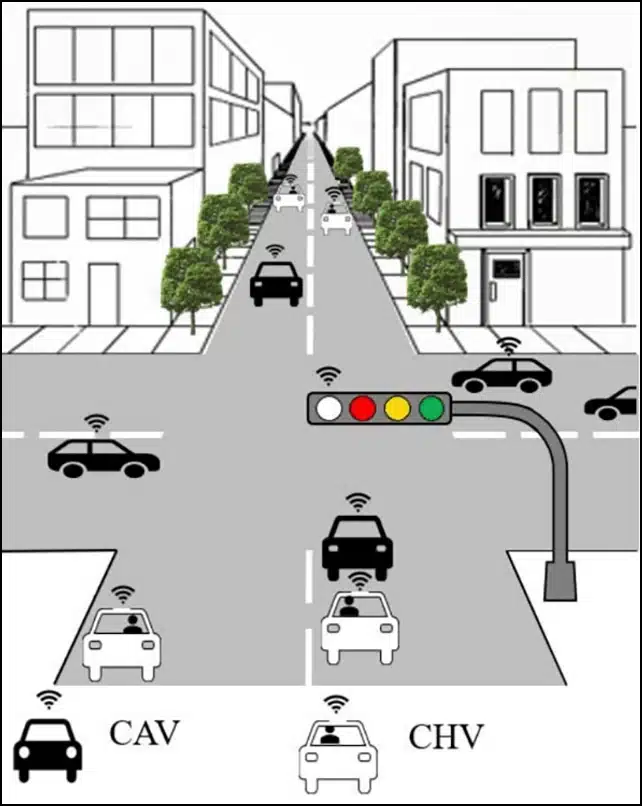
ホワイトフェーズのコンセプトは、AV機器同士が無線で通信し、信号機を制御するコンピューターとも通信できることに基づく。たとえば、より多くの車両が合流する道路を優先し、最適な速度をアドバイスするのだ。十分な数のAVが交差点に近づくと、白色灯が点灯する。白色灯は、AVが効率よく交差点を通過できるよう、動きを協調していることを示す信号である。人が運転する非自動運転車は、前の車が止まれば自分も止まり、前の車が交差点を通過すれば自分も交差点を通過する。
交差点の信号機は、交差点に進入する車両がAVではなく、人間が運転する車が多くなって来た場合は、信号機は従来の緑・黄・赤の信号パターンに戻る。こうした切り替えをシームレスに行う事によって、交差点の流れをスムーズにすることが出来るとのことだ。
「AVに交通の流れを制御させるのは、モバイルコントロールパラダイムと呼ばれる比較的新しい考え方です」とHajbabaie氏。「AVを含むあらゆるシナリオで、交通の調整に使うことができます。しかし、交差点で白色光のコンセプトを取り入れることは、人間のドライバーに状況を伝え、交差点に近づいたときに何をすべきかを知ってもらうために重要だと考えています。」
研究者たちは、2020年に初めて「ホワイトフェーズ」交通交差点のコンセプトを発表した。しかし、その最初のコンセプトは、集中型コンピューティングのアプローチに依存しており、信号機を制御するコンピューターが、接近するすべてのAVからの入力を受け取り、必要な計算を行い、AVに交差点をどのように進むべきかを指示する責任を負っていた。
「この論文では、分散コンピューティングに依存するホワイトフェーズのコンセプトについて概説しています。この方法は、より効率的であり、通信障害も起こりにくい。例えば、信号機との通信に中断やタイムラグがあっても、分散コンピューティングのアプローチなら交通の流れをスムーズに処理することができるのです。」と、Hajbabaie氏は説明する。
シミュレーションモデルでは、AVは単独でも交通の流れを改善し、さらにホワイトフェーズを導入すると、燃費の低減にプラスの効果があることが示された。また、交差点でのAVの割合が高いほど交通の流れが速くなり、遅延の総和が約40〜99%改善されることが判明したという。
また、研究者らは便宜的に「白色灯」で提案したが、色は必ずしも白である必要はなく、人間のドライバーからしっかりと認識出来る物であれば何色でも良いとしている。
また、シミュレーションの結果として、交差点での自律走行車の数が30パーセントを超えると、改善がより顕著になると指摘している。交通量に占めるAVの割合が70パーセントになると、交差点はほとんど完全な自動ホワイトフェーズモードとして走行できるようになるという。
もちろん、すべての交差点を改良するには時間と費用がかかるが、研究者たちは、ホワイトフェーズのアイデアのある側面は比較的容易に実現できると考えている。特定の地域で試験運用することが、次のステップになるかもしれない。
「港湾では商用車の通行量が多く、交通の流れが特に重要です。商用車は自律走行車の導入率が高いようなので、そのような環境でパイロットプロジェクトを実施すれば、港湾交通と商業輸送に利益をもたらす機会があるかもしれません。」
論文
参考文献
- NC State University: Researchers Propose a Fourth Light on Traffic Signals – For Self-Driving Cars
研究の要旨
本研究では、信号交差点を通過するコネクテッド・オートメーション・ビークル(CAV)とコネクテッド・ヒューマン・ドライブ・ビークル(CHV)の混合交通流を制御するための車両レベルの分散協調戦略を提示する。CAVはCHVのグループを先導するために右側通行を交渉し、CHVは直前の車両に従わなければならないが、新たに導入した「ホワイトフェーズ」ではCAVをモバイル交通管制官として用いる。CAVの普及率が低く、車両が青信号を待たなければならない状況では、白色フェーズは発動されない。我々はこの問題を分散型混合整数非線形計画として定式化し、全車両の軌道と信号タイミングパラメータに関する合意を形成する手法を開発した。軌道に関する合意は、衝突を回避するために他車両の共有軌道に基づいてCAVが軌道を更新し、他車両と軌道を共有する反復処理によって達成される。さらに、信号タイミングパラメータに関する合意は、最も投票された実現可能な信号タイミングパラメータが選択される投票プロセスを通じて形成される。数値実験の結果、提案手法は様々なCAVの市場シェアの下で、信号交差点における車両移動を効率的に制御できることが示された。また、白色フェーズを導入することで、様々なCAVのシェアにおいて、協調軌道および信号最適化と比較して、3.2%から94.06%の総遅延を削減できることを実験的に確認した。また、数値計算の結果、提案手法により、交通信号最適化ソフトウェアによる完全作動型信号制御と比較して、40.2%~98.9%の遅延の削減が可能であることが示された。





コメントを残す