
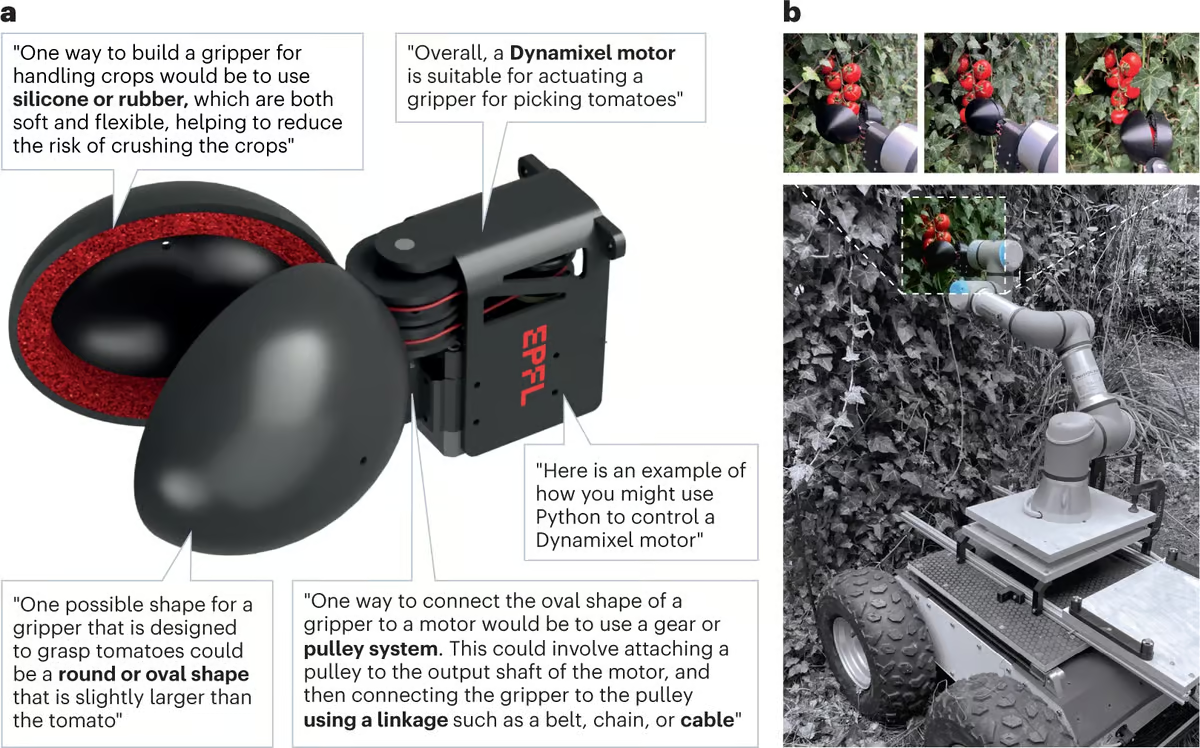
ChatGPTのような大規模言語モデル(LLM)の登場は、今まさに世界を変えている。この強力なプラットフォームは、文書作成やコーディング支援、言語学習のお供など、様々な用途があるが、オランダのデルフト工科大学とスイス連邦工科大学(EPFL)の研究者は、ChatGPTを用いてトマト収穫用ロボットグリッパーを開発し、人工知能ツールが人間との共同作業でロボットデザインを行う可能性を初めて証明した。彼らの研究は、ChatGPTなどの大規模言語モデルが、ロボットの運用方法を完全に変革し、よりインテリジェントで効率的、そして複雑なタスクを実行できるようにする可能性を示唆するものだ。
ChatGPTとの共同作業
研究者らは、この経験に基づき、人工知能(AI)ツールをロボット工学に適用することの機会とリスクについて述べている。このツールは、「プロセスを豊かにし簡素化しながら、ロボット設計の方法を変えることができる」と彼らは主張している。
「Chat-GPTは言語モデルであり、そのコード生成はテキストベースであるにもかかわらず、物理設計に重要な洞察と直感をもたらし、人間の創造性を刺激するサウンドボードとして大きな可能性を示しました」とEPFLの工学部のComputational Robot Design & Fabrication Labの代表であるJosie Hughes氏は述べている。
第一段階では、研究者とLLMが「アイデア出し」のディスカッションを行い、ロボットの目的、設計パラメータ、仕様を定義した。第2フェーズでは、LLMが生成したコードの開発、デバイスの製作、機能のトラブルシューティングなど、現実世界でのロボットの実現に専念した。
研究者たちは、高い概念レベルからスタートし、人類が将来直面する課題についてLLMと会話し、世界の食糧供給という課題に対する解決策として、ロボットによる作物の収穫を特定した。LLMは、学術論文、技術マニュアル、書籍、メディアから得たグローバルなデータにアクセスすることで、研究者が投げかける「収穫ロボットはどんな機能を持つべきか?」といった問いかけに対して最も確率の高い答えを提供する。
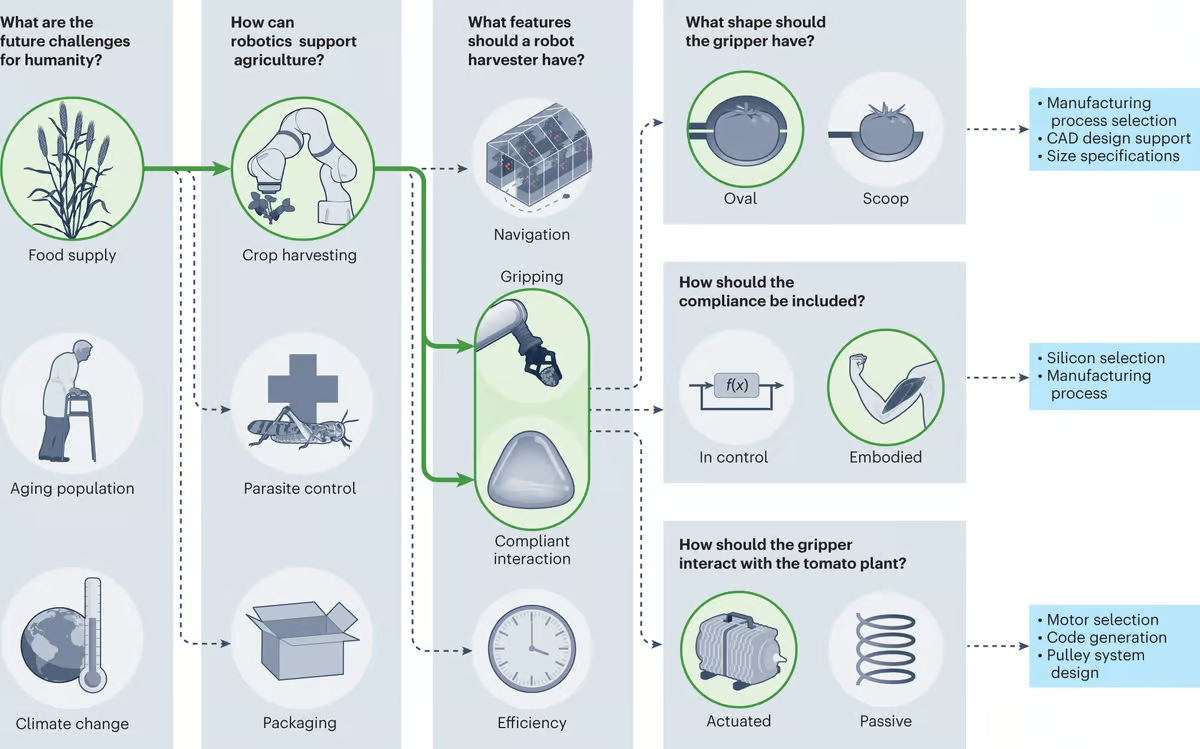
基本的なロボットの形式が明らかになれば、研究者は材料やデバイスを制御するためのプログラミングコードなど、設計の具体的な内容に移ることが出来るのだ。
「これまで計算機は、技術的な実装を支援するために使われてきましたが、AIシステムが初めて新しいシステムを考案し、高度な認知作業を自動化することができるようになりました。これは、人間の役割をより技術的なものへとシフトさせることにつながるかもしれません」と、デルフト工科大学のCosimo Della Santina氏は述べている。
ChatGPTに “発明家”の役割を与えることに加え、研究者たちは、人間とLLMのコラボレーションがもたらす他の利点にも注目している。”共同研究 “は、人工知能を使って、自分の分野を超えた幅広い知識を提供することで、研究者のスキルをサポートするものだ。AIは、人間が創造的なコントロールを維持したまま、設計プロセスの改善や技術的なインプットを支援する “漏斗”として機能することが出来るのだ。
各共同研究モードには論理的・倫理的なリスクがあるため、研究者は、LLMの役割を今後慎重に評価する必要があると警告している。
「本研究では、Chat-GPTは、収穫ロボットを追求する価値が最も高い作物としてトマトを挙げています。しかし、これは、本当に必要な作物ではなく、文献で多く取り上げられている作物に偏っている可能性があります。エンジニアの知識の範囲外で意思決定が行われると、倫理的、技術的、事実的に大きな誤りが生じる可能性があります」とHughes氏は述べている。
こうした注意点はあるものの、Hughes氏らのチームは、自分たちの経験に基づき、LLMはうまく管理すれば、良い方向に向かう力になる大きな可能性を秘めていると結論付けている:「したがって、ロボット工学のコミュニティは、倫理的、持続可能、社会的な力を与える方法でロボットの進歩を加速させるために、この強力なツールをどのように活用するかを特定しなければなりません」。
論文
- Nature Machine Intelligence: How can LLMs transform the robotic design process?
参考文献
- EPFL: Researchers unveil first Chat-GPT-designed robot
- TU Delft: ChatGPT designs its first robot with TU Delft researchers
- via NewAtlas: AI and humans collaborate on first ChatGPT-designed robot
研究の要旨
大規模言語モデル(LLM)は、自然言語を理解し分析する前例のない能力をロボットに提供することで、ロボット工学の状況を根本的に変える。LLMの主な利点は、説明書、技術マニュアル、学術論文などの大量のテキストデータを処理し、内在化する能力であり、この暗黙知を利用して質問に事実と整合性をもって応答することができる。このような強力なAIツールをロボット工学に活用する可能性は、テキストプロンプトからコードを合成する能力2や、自然言語による指示をロボットが実行可能なアクションに変換する能力によって既に示されている。しかし、最近、LLMの利用可能性と能力が向上したことで、新たな機会が生まれ、ロボット工学のもう一つのボトルネックである設計に貢献する可能性があります。LLMの新たな能力を活用することで、ロボットを作る際に人間を教育し、刺激し、導くような対話を提供することができる。このような能力は、ロボットを設計する方法論を根本的に変え、人間の役割を変え、設計プロセスを豊かにし、簡素化することができる。では、LLMはどのようにロボットの設計プロセスを変えることができるのか、また、それに伴う機会とリスクは何なのか。





コメントを残す